












Kameras - Schnittstellen & andere Parameter
Digitale Kameraschnittstellen
Dies ist der Abschnitt 10.1 des Leitfadens zur Bildverarbeitung.
Mit dem Fortschritt der Bildverarbeitungstechnologie werden auch die Kameratypen und ihre Schnittstellen ständig weiterentwickelt, um den Anforderungen einer Vielzahl von Anwendungen gerecht zu werden. Für Bildverarbeitungsanwendungen zur Inspektion und Analyse in der Halbleiter- und Elektronikindustrie sowie in der Biotechnologie, Montage und Fertigung ist die Verwendung des besten Kamerasystems für die jeweilige Aufgabe entscheidend, um die bestmögliche Bildqualität zu erzielen. Das Verständnis der Kameras und ihrer Parameter wie digitale Schnittstellen, Stromversorgung und Software bietet eine großartige Möglichkeit, sich vom Bildgebungsanfänger zum Bildgebungsexperten weiterzuentwickeln.
Digitale Kameras sind mit einer Vielzahl verschiedener Schnittstellen verfügbar, deren Einsatz oft von den Anforderungen der Anwendung abhängt. Einige Schnittstellen, wie z. B. die USB-Varianten, können den Aufbau extrem vereinfachen, da Videosignal und Strom über das gleiche Kabel laufen. Andere Schnittstellen erfordern möglicherweise eine zusätzliche Stromversorgung, bieten jedoch Vorteile wie höhere Datenübertragungsraten, die sich auf die Bildrate der Kamera auswirken, oder unterstützen eine größere Kabellänge und eine größere Anzahl von simultan geschalteten Geräten. Tabelle 1 vergleicht die verschiedenen Schnittstellen der Digitalkameras.
| Vergleich der digitalen Schnittstellen | ||||||
|---|---|---|---|---|---|---|
| DIGITALE SIGNALE HINWEIS: Abbildungen nicht maßstabsgetreu gezeichnet |
  |
 |
|
|
 |
 |
| USB 3.1 | GigE (PoE) | 5 GigE (PoE) | 10 GigE (PoE) | CoaXPress | Camera Link® | |
| Datenübertragungsrate: | 5 Gb/s | 1000 Mb/s | 5 Gb/s | 10 Gb/s | bis zu 12,5 Gb/s | bis zu 6,8 Gb/s |
| Max. Kabellänge: | 3 m (empfohlen) | 100 m | 100 m | 100 m | >100 m bei 3,125 Gb/s | 10 m |
| Anzahl Geräte: | bis zu 127 | unbegrenzt | unbegrenzt | unbegrenzt | unbegrenzt | 1 |
| Anschluss: | USB 3.1 Micro B/USB-C | RJ45 / Cat5e oder 6 | RJ45 / Cat5e oder 6 | Cat7 oder optische Verkabelung | RG59 / RG6 / RG11 | 26 Pins |
| Videoaufnahmekarte: | optional | nicht erforderlich | nicht erforderlich | nicht erforderlich | optional | benötigt |
Tabelle 1: Vergleich der gängigen Digitalkamera-Schnittstellen
USB (Universal Serial Bus)
USB 3.1 Gen 1, vorher USB 3.0, ist eine beliebte Schnittstelle aufgrund ihrer Allgegenwärtigkeit bei Computern. Sie ist schnell und komfortabel; die maximal erreichbare Geschwindigkeit hängt von der Anzahl der USB-Peripheriegeräte ab, da die Übertragungsrate fest bei 5 Gb/s liegt. Bei USB3 Vision basieren die Kamerasteuerregister auf dem EMVA-GenICam-Standard. Der Standard USB3 Vision besitzt nicht dieselbe Abwärtskompatibilität wie der Computer-Standard, aber einige USB 3.1 Gen 1 Kameras sind abwärtskompatibel, sodass sie auch mit der langsameren Geschwindigkeit von USB 2.0 (480 Mb/s) betrieben werden können. Der bei Bildverarbeitungskameras mit USB 3.1 am häufigsten verwendete Anschluss ist der Stecker USB 3.1 Micro B. Allmählich kommt USB-C (USB Typ C) auf den Markt und wird in Zukunft wohl immer häufiger vertreten sein. Er bietet Single- und Dualband-Topgeschwindigkeiten von 10 bzw. 20 Gb/s. Außerdem hat dieser Stecker eine kleinere Grundfläche und ist umkehrbar. Während Kabel und Kameras, die derzeit USB-C verwenden, noch auf die Datenübertragungsgeschwindigkeiten von USB 3.1 Gen 1 beschränkt sind, wird dieser neuere Stecker benötigt, wenn sich in der Industrie USB 3.1 Gen 2 als alternative Hochgeschwindigkeitsschnittstelle durchsetzt.
GigE (Gigabit Ethernet)
GigE basiert auf dem Gigabit-Ethernet-Internetprotokoll und verwendet standardmäßige Cat-5e- und Cat-6-Kabel für eine Hochgeschwindigkeits-Kameraschnittstelle. Standardmäßige Ethernet-Hardware wie Switches, Hubs und Repeater können für den Einsatz mehrerer Kameras verwendet werden, allerdings muss die Gesamtbandbreite berücksichtigt werden, wenn keine Peer-to-Peer-Verbindung (Direktverbindung Kamera zu Karte) verwendet wird. Bei GigE Vision basieren die Kamerasteuerregister auf dem EMVA-GenICam-Standard. Die bei einigen Kameras optionale Link Aggregation (LA) verwendet mehrere Ethernet-Ports parallel, um die Datenübertragungsrate zu erhöhen. Das ebenfalls von einigen Kameras unterstützte Precision Time Protocol (PTP) kann verwendet werden, um die Uhren mehrerer im gleichen Netzwerk angeschlossener Kameras zu synchronisieren, sodass eine feste Verzögerung zwischen den jeweiligen Belichtungen entsteht. 5 GigE und 10 GigE sind neuere Versionen der GigE-Schnittstelle, die Datenübertragungsraten von 5 Gb/s bzw. 10 Gb/s bieten.
CoaXPress
CoaXPress ist eine digitale Plug&Play-Hochgeschwindigkeitsschnittstelle für den Einsatz in hochauflösenden Bildverarbeitungsanwendungen, die eine hohe Bildrate erfordern. Für CoaXPress werden ein oder auch mehrere Koaxialkabel verwendet; jedes Kabel kann bis zu 12,5 Gb/s übertragen und bis zu 13 W Leistung bei 24 V liefern. CoaXPress ist skalierbar und so gibt es bei hier kein festgelegtes Maximum für eine Kabellänge; je höher die Bandbreite, desto kleiner die maximale Kabellänge.
Camera Link®
Camera Link® ist ein serieller Hochgeschwindigkeits-Schnittstellenstandard, der explizit für Anwendungen in der industriellen Bildverarbeitung entwickelt wurde. Für die Verwendung wird eine Camera Link® Videoaufnahmekarte benötigt und die Kamera muss separat mit Strom versorgt werden. Eine spezielle Verkabelung ist erforderlich, da zusätzlich zu den LVDP-Signalleitungen (Low Voltage Differential Pair) separate asynchrone serielle Kommunikationskanäle benötigt werden, um die volle Bandbreite für die Datenübertragung zu sichern. Die Basiskonfiguration mit einem Kabel ermöglicht eine Übertragung von 2,04 Gb/s speziell für Video. Zwei Ausgänge (Vollkonfiguration) ermöglichen getrennte Sende-/Empfangsleitungen für Kameraparameter, um eine höhere Datenübertragung (6,8 Gb/s) für extreme Hochgeschwindigkeitsanwendungen zu schaffen.
Aufnahmekarten
Die Bildverarbeitung erfolgt in der Regel mit Hilfe von Computern, sodass bei der Verwendung von analogen Kameras eine digitale Schnittstelle erforderlich ist. Aufnahmekarten ermöglichen dem Anwender eine Erfassung analoger Kamerasignale mit einem Computer für die Analyse. Für analoge Signale wie NTSC, YC, PAL und CCIR enthält die Aufnahmekarte einen Analog-Digital-Wandler (ADC) und digitalisiert so das Signal für die weitere Bildverarbeitung. Der Benutzer kann Bilder aufnehmen und sie für die spätere Bearbeitung und Ausdrucke speichern. Im Lieferumfang der Aufnahmekarten ist eine einfache Erfassungssoftware enthalten, mit der der Benutzer Bilder speichern, öffnen und anzeigen kann.
Der Begriff Aufnahmekarte wird auch für Karten verwendet, die zur Erfassung und Interpretation der Daten von Digitalkamera-Schnittstellen notwendig sind, die nicht auf Standard-Computeranschlüssen basieren.
Laptops und Kameras
Obwohl viele Digitalkamera-Schnittstellen an Laptops angeschlossen werden können, wird dringend empfohlen, Standard-Laptops für Hochleistungs- und/oder Hochgeschwindigkeits-Bildgebungsanwendungen zu vermeiden. Oftmals unterstützen die Datenbusse des Laptops nicht die volle Übertragungsgeschwindigkeit und es sind zu wenig Ressourcen verfügbar, um die Vorteile von Hochleistungskameras und -software voll auszunutzen. Insbesondere die in den meisten Laptops standardmäßig verbauten Ethernet-Netzwerkschnittstellenkarten haben eine deutlich geringere Leistung als die für Desktop-Computer verfügbaren PCIe-Karten.
Stromversorgung
Dies ist der Abschnitt 10.2 des Leitfadens zur Bildverarbeitung.
Viele Kameraschnittstellen ermöglichen eine Stromversorgung der Kamera über das Signalkabel (z. B. USB oder PoE). Power over Ethernet (PoE) ist nicht bei allen GigE-Kameras verfügbar. Wenn PoE nicht verfügbar ist, erfolgt die Stromversorgung üblicherweise entweder über einen Hirose-Anschluss (der auch eine Triggerung und I/O ermöglicht) oder über einen standardmäßigen AC/DC-Adapteranschluss. Allerdings kann auch wenn die Kamera über die Karte oder den Anschluss mit Strom versorgt werden kann, die Verwendung des optionalen Stromanschlusses von Vorteil sein. Im Folgenden finden Sie drei verschiedene Möglichkeiten, eine GigE-Kamera anzuschließen und mit Strom zu versorgen:
GPIO-Stromkabelanschluss (General-Purpose Input/Output)
Verbinden Sie die Kamera über ein GigE-Kabel mit einem Computer. Stecken Sie als nächstes das GPIO-Stromkabel, das auch als Hirose-Anschlusskabel bezeichnet wird, in eine Steckdose und verbinden Sie es mit dem Stromanschluss der Kamera. Verschiedene Kameras benötigen GPIO-Kabel mit einer unterschiedlichen Anzahl von Pins, z. B. 6 oder 12. Für Kameras ohne PoE ist ein Stromkabel die einzige Methode zur Stromversorgung der Kamera.
PoE-Injektor
PoE-Injektoren können eine Kamera über ein GigE-Kabel mit Strom versorgen. Dies kann wichtig sein, wenn aus Platzgründen keine eigene Stromversorgung für die Kamera möglich ist, z. B. bei Installationen in der Fertigung oder bei Außenanwendungen. In diesem Fall wird der Injektor irgendwo im Verlauf des Kabels hinzugefügt und mit einem Standardkabel mit Kamera und Computer verbunden. Nicht alle GigE-Kameras sind allerdings PoE-kompatibel. Stecken Sie das Netzkabel des PoE-Injektors ein und verbinden Sie dessen "IN"-Anschluss über ein GigE-Kabel mit einem Computer. Verbinden Sie anschließend mit einem weiteren GigE-Kabel den "OUT"-Anschluss des Injektors mit Ihrer Kamera.
Power-over-Ethernet-Netzwerkschnittstellenkarte (PoE-NIC)
PoE-NICs versorgen eine Kamera über einen Computer und eine Kupferschnittstelle mit Strom und ermöglichen gleichzeitig den Anschluss der Kamera an ein sicheres Glasfasernetzwerk. PoE-NICs reduzieren auch die Anzahl der benötigten Steckdosen und Kabel. Stecken Sie die PoE-Karte in einen freien Steckplatz auf einem Computer-Motherboard und schließen Sie den internen Stromanschluss an. Verbinden Sie dann mit einem GigE-Kabel einen der PoE-Ports der Karte und die Kamera.
Software
Dies ist der Abschnitt 10.3 des Leitfadens zur Bildverarbeitung.
Im Allgemeinen gibt es zwei Möglichkeiten, wenn es um Bildverarbeitungssoftware geht: kameraspezifische Software-Development-Kits (SDKs) oder Software von Drittanbietern. SDKs umfassen Anwendungsprogrammierschnittstellen mit Codebibliotheken für die Entwicklung von benutzerdefinierten Programmen sowie einfache Bildbetrachtungs- und -erfassungsprogramme, die keine Codeerstellung erfordern und eine einfache Funktionalität bieten. Bei Software von Drittanbietern sind die unterstützten Kamerastandards (GenICam, DCAM, USB3 Vision, GigE Vision) wichtig, um die Funktionalität zu gewährleisten. Software von Drittanbietern ist z. B. Software wie NI LabVIEW™, MATLAB® und OpenCV. Oft ist Software von Drittanbietern in der Lage mehrere Kameras zu betreiben und mehrere Schnittstellen zu unterstützen, aber es liegt letztendlich am Benutzer, die Funktionalität vorher zu prüfen.
Sensoren
Dies ist der Abschnitt 10.4 des Leitfadens zur Bildverarbeitung.
Sensorgröße
Die Größe der aktiven Fläche eines Kamerasensors ist wichtig für die Bestimmung des Bildfelds (FOV) und der primären Vergrößerung des Systems $ \small { \left( m \right)} $. Bei einer festen Vergrößerung, die durch das Objektiv bestimmt wird, ergeben größere Sensoren größere Bildfelder. Wie in Abbildung 1 und in Tabelle 2 dargestellt, gibt es verschiedene Standardgrößen von Flächen-Sensoren. Die Nomenklatur dieser Standards geht auf die Vidicon-Vakuumröhren zurück, die für Fernsehübertragungsbilder verwendet wurden, und es ist wichtig zu wissen, dass die tatsächlichen Abmessungen der Sensoren abweichen können. Die meisten der Standards behalten jedoch ein Seitenverhältnis von 4:3 (horizontal:vertikal) bei.
Bei Bildgebungsanwendungen sollte darauf geachtet werden, dass ein Objektiv immer nur für bestimmte Sensorgrößen geeignet ist. Wenn der Sensor zu groß für das Objektivdesign ist, kann das Bild aufgrund von Vignettierung (Auslöschung von Strahlen, die durch die äußeren Ränder der Linsen fallen) zu den Rändern hin verblassen und schlechter werden. Dies wird manchmal als Tunneleffekt bezeichnet, da die Ränder des Feldes dunkel werden. Bei zu kleinen Sensorgrößen tritt das Problem der Vignettierung nicht auf.
CCD- vs. CMOS-Sensoren
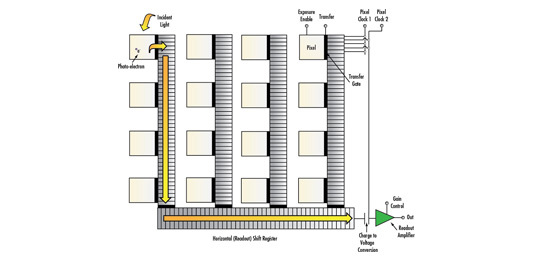
CCD (Charge Coupled Device) und CMOS (Complementary Metal Oxide Semiconductor) sind unterschiedliche Sensortechnologien zur Umwandlung von Licht in elektronische Signale. In einem CCD wird die Ladung jedes Pixels in eine Spannung umgewandelt, zwischengespeichert und als analoges Signal über einen einzigen Knotenpunkt übertragen. In einem CMOS-Sensor erfolgt die Ladungs-/Spannungsumwandlung auf der Pixelebene. Früher ergab diese Umwandlung eine weniger gleichmäßige Ausgabe.
Neue Fortschritte in der CMOS-Technologie in den letzten Jahren haben dazu beigetragen die Ungleichmäßigkeit bei schlechten Lichtverhältnissen stark zu reduzieren und in vielen Anwendungen können High-End-CMOS-Sensoren vergleichbare CCDs übertreffen. Außerdem haben CMOS-Sensoren einen geringeren Stromverbrauch als CCD-Sensoren. CMOS-Sensoren der unteren Leistungsklasse mit Pixeln, die kleiner als ca. 3 Mikrometer sind, werden in Bezug auf die Bildqualität immer noch von CCDs übertroffen. Die Leistungsunterschiede sind in Tabelle 3 zusammengefasst.

Abbildung 1: Sensorgrößen für standardmäßige Kamerasensoren
| Kameraauflösung nach Pixelgröße | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Pixelgröße [µm] | 9,9 | 7,4 | 5,86 | 5,5 | 4,54 | 3,69 | 3,45 | 2,2 | 1,67 |
| Auflösung $ \left[ \tfrac{\text{lp}}{\text{mm}} \right) $ | 50,5 | 67,6 | 85,3 | 90,9 | 110,1 | 135,5 | 144,9 | 227,3 | 299,4 |
| Typischer ½" Sensor [MP] | 0,31 | 0,56 | 0,89 | 1,02 | 1,49 | 2,26 | 2,58 | 6,35 | 11,02 |
Tabelle 2: Kameraauflösung nach Pixelgröße
| CCD- vs. CMOS-Sensoren | |||||
|---|---|---|---|---|---|
| CCD | CMOS | CCD | CMOS | ||
| Pixel-Signal: | Elektronen-Paket | Spannung | Gleichförmigkeit: | hoch | mittel |
| Sensor-Signal: | analog | digital | Auflösung: | niedrig-hoch | niedrig-hoch |
| Füllfaktor: | hoch | mittel | Geschwindigkeit: | mittel-hoch | hoch |
| Empfindlichkeit: | mittel | mittel-hoch | Stromverbrauch: | mittel-hoch | gering |
| Rauschen: | gering | niedrig bis hoch | Komplexität: | gering | mittel |
| Dynamikbereich: | hoch | mäßig bis hoch | Kosten: | mittel | gering |
Tabelle 3: CCD- vs. CMOS-Sensoren
Spektrale Eigenschaften
Dies ist der Abschnitt 10.5 des Leitfadens zur Bildverarbeitung.
Je nach den Anforderungen einer Anwendung kann die Fähigkeit einer Kamera Farbe wiederzugeben vor- oder nachteilig sein. Ein Vergleich von Monochrom-, Ein-Chip-Farb- und Drei-Chip-Farbkameras ist in Tabelle 4 dargestellt und wird im folgenden Abschnitt näher erläutert.
| Monochrom vs. Farbe | ||
|---|---|---|
| Monochromkamera | Farbkamera (ein Sensor) | 3-Chip-Farbkamera |
| Einzelner Sensor gibt Graustufenbilder aus | Verwendet RGB-Bayer-Farbfilter (typischerweise) | Verwendet ein Prisma, um weißes Licht auf 3 verschiedene Sensoren aufzuteilen |
| 10% höhere Auflösung als vergleichbare Farbkameras mit einem Sensor | Geringere Auflösung (mehr Pixel zum Erkennen von Farbe erforderlich) | Teurer |
| Besseres Signal-Rausch-Verhältnis; höherer Kontrast | Bessere Farbauflösung | |
| Erhöhte Empfindlichkeit bei schwachem Licht | Kleinere Auswahl an möglichen Objektiven | |
| Kann speziell entwickelte Objektive erfordern | ||
Tabelle 4: Vergleich von Monochrom-, Ein-Chip-Farb- und Drei-Chip-Farbkameras
Monochromkameras
CCD- und CMOS-Sensoren sind aus Silizium hergestellt und daher empfindlich für Wellenlängen von ca. 350 - 1050 nm, wobei der nutzbare Bereich üblicherweise mit 400 - 1000 nm angegeben wird. Diese Empfindlichkeit wird auch durch die Spektralkurve des Sensors verdeutlicht (Abbildung 2). Die meisten hochwertigen Farbkameras und einige Monochromkameras verfügen jedoch über einen Infrarotsperrfilter für die Abbildung speziell im sichtbaren Spektrum.

Abbildung 2: Normalisierte spektrale Empfindlichkeit eines typischen monochromen CCDs
Farbkameras
Der Festkörpersensor basiert auf dem photoelektrischen Effekt und kann daher nicht ohne zusätzliche „Hilfe“ zwischen Farben unterscheiden. Es gibt zwei Arten von CCD-Farbkameras: Ein-Chip- und Drei-Chip-Kameras. Farbkameras mit einem Chip bieten eine gängige, kostengünstige Bildgebungslösung und verwenden einen optischen Mosaikfilter (z. B. Bayerfilter), um verschiedene Pixel nur für bestimmte Wellenlängen des Lichts empfindlich zu machen. Ein Farbbild wird dann in der Software mithilfe eines "De-Bayering"-Algorithmus rekonstruiert, der die echten Farbinformationen aus den RGB-Signalen interpoliert. Da so zur Erkennung von Farbe mehr Pixel benötigt werden, haben Ein-Chip-Farbkameras von Natur aus eine geringere Auflösung als ihre monochromen Gegenstücke. Farbkameras mit drei Chips sollen dieses Auflösungsproblem lösen, indem sie ein Prisma verwenden, das jeden Abschnitt des einfallenden Spektrums auf einen anderen Chip lenkt. Kameras mit drei CCDs bieten in der Regel extrem hohe Auflösungen und eine genauere Farbwiedergabe, haben aber eine geringere Lichtempfindlichkeit und können teurer sein.
Bildrate und Verschlussgeschwindigkeit
Die Bildrate bezieht sich auf die Anzahl der Vollbilder, die in einer Sekunde aufgenommen werden können. Bei Hochgeschwindigkeitsanwendungen ist es von Vorteil eine schnellere Bildrate zu wählen, um mehr Bilder des Objekts zu erfassen, während es sich durch das Bildfeld bewegt. Die Verschlussgeschwindigkeit entspricht dem Kehrwert der Belichtungszeit des Sensors. Die Belichtungszeit steuert die Menge des einfallenden Lichts, die vom Sensor erfasst wird. Blooming (verursacht durch Überbelichtung) kann durch Verringerung der Beleuchtung oder durch Erhöhung der Verschlussgeschwindigkeit (Verkürzung der Belichtungszeit) verhindert werden.
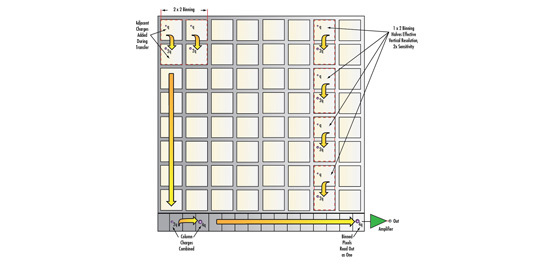
Die maximale Bildrate für ein System ist abhängig von der Auslesegeschwindigkeit des Sensors, der Datenübertragungsrate der Schnittstelle und der Anzahl der Pixel (Menge der pro Bild übertragenen Daten). Oft kann eine Kamera mit einer höheren Bildrate betrieben werden, indem die Auflösung durch Zusammenfassen von Pixeln (Binning) oder Einschränkung des aufgenommenen Bereichs reduziert wird. Bei Digitalkameras können Belichtungen zwischen einigen zehn Mikrosekunden bis hin zu Minuten realisiert werden, wobei die längsten Belichtungen im Allgemeinen nur mit CCD-Kameras sinnvoll sind, da diese im Vergleich zu CMOS-Kameras geringere Dunkelströme und geringeres Rauschen aufweisen.
Elektronischer Verschluss: Global vs. Rolling
Die Funktionsweise eines Global Shutters ist analog zu einem mechanischen Verschluss: Es werden alle Pixel gleichzeitig belichtet. Das Auslesen erfolgt zwar sequentiell, aber die Photonenerfassung startet und stoppt für alle Pixel zur gleichen Zeit. Bei einem Rolling Shutter hingegen erfolgt Belichtung, Abtastung und Auslesung sequentiell; das bedeutet, dass jede Zeile des Bildes zu einem etwas anderen Zeitpunkt erzeugt wird. Bilder von sich bewegenden Objekten werden durch einen Rolling Shutter verzerrt; dieser Effekt kann durch einen Blitz minimiert werden, der zu dem Zeitpunkt ausgelösten wird, an dem sich die Integrationszeit der Zeilen überschneidet. Beachten Sie, dass dieser Effekt bei niedrigen Geschwindigkeiten kein Problem darstellt. Die Implementierung eines Global Shutters für CMOS erfordert einen komplizierteren Sensoraufbau als das standardmäßige Rolling-Shutter-Modell und ist daher nicht bei allen CMOS-Sensoren verfügbar. Ein Vergleich von Global und Rolling Shutter ist in Abbildung 3 dargestellt.



Abbildung 3: Vergleich der Bewegungsunschärfe: Stillstehende Leiterplatte (A) und Bilder der bewegten Leiterplatte mit kontinuierlichem Global Shutter (B) und Rolling Shutter (C).
Im Gegensatz zu Global und Rolling Shutter bezieht sich ein asynchroner Shutter auf die getriggerte Belichtung der Pixel. Das heißt, dass die Kamera bereit für eine Bildaufnahme ist, die Pixel aber erst nach dem Empfang eines externen Auslösesignals aktiviert. Dies steht im Gegensatz zu einer normalen und konstanten Bildrate, die man sich als interne Auslösung des Verschlusses vorstellen kann.
Weitere Informationen zu Digitalkamera- und Sensoreinstellungen, einschließlich Gain, Gamma, Area of Interest (AOI) und mehr finden Sie unter Bildgebungselektronik 101: Bessere Bilder durch richtige Digitalkameraeinstellungen.
Flächensensor vs. Zeilensensor
Dies ist der Abschnitt 10.6 des Leitfadens zur Bildverarbeitung.
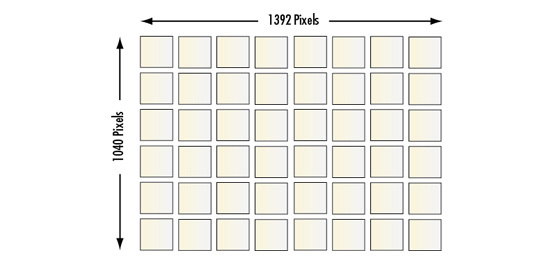
Je nach den Anforderungen einer Anwendung muss sich der Entwickler eines Systems zwischen einer Flächen- oder Zeilenkamera entscheiden. Bei Flächenkameras fokussiert ein Objektiv das abzubildende Objekt auf das Sensorarray und das Bild entsteht auf allen Pixeln gleichzeitig (Abbildung 4a). Dies ist praktisch, wenn sich das Bild nicht schnell bewegt oder wenn das Objekt nicht extrem groß ist. Bei Zeilenkameras sind die Pixel linear angeordnet und während sich das Objekt an der Kamera vorbeibewegt, wird das Bild zeilenweise aufgenommen und mit Hilfe von Software rekonstruiert (Abbildung 4b).

Abbildung 4: Zeichnung einer Flächenkamera (links) und einer Zeilenkamera (rechts)
Lineare Arrays sind zu viel höheren Auflösungen fähig als Flächenarrays, bei denen 4000 Pixel die höchste typische horizontale Auflösung darstellen, während bei Zeilensensoren mehr als 16000 Pixel nicht ungewöhnlich sind. Bei Zeilenkameras muss das Objekt zur Bildaufnahme sehr präzise relativ zur Kamera bewegt werden, was die Integration erheblich erschwert. Eine kurze Übersicht zu Flächen- und Zeilensensoren finden Sie in Tabelle 5.
| Digitalkamera-Formate | ||
|---|---|---|
| Flächensensor | Zeilensensor | |
| 4:3-Verhältnis (typischerweise) | Sensor ist linear | |
| Hochgeschwindigkeitsanwendungen bis zu mehrere hundert FPS | Hochgeschwindigkeitsanwendungen - Zeilenraten bis zu 100 kHz | |
| Objekt ist feststehend oder bewegt sich langsam | Erzeugt das Bild Zeile für Zeile | |
| Breiteres Spektrum an Anwendungen | Objekt bewegt sich am Sensor vorbei | |
| Leichtere Einrichtung | Ideal für die Aufnahme von großen Objekten | |
| Geringere Kosten als Zeilensensoren | Spezielle Ausrichtung & Timing erforderlich | |
| Komplexe Integration / Einfache, aber intensive, Beleuchtung | ||
Tabelle 5: Vergleich von Digitalkamera-Formaten: Flächen- und Zeilensensoren
| Standardmäßige Kamera-/Objektivbefestigungen | ||||
|---|---|---|---|---|
| C-Mount | CS-Mount | TFL-Mount | F-Mount | Weitere übliche Gewinde |
| Gewindemontage | Gewindemontage | Gewindemontage | Nikon-Bajonettfassung (ohne Gewinde) | M12 x 0,5 (S-Mount) |
| 1" Durchmesser mit 32 TPI (Threads per Inch) | 1" Durchmesser mit 32 TPI (Threads per Inch) | M35 x 0,5 mm | Wird bei Kameras mit großen Sensoren verwendet | M42 x 1,0 |
| 17,5 mm Auflagemaß | 12,5 mm Auflagemaß | 17,5 mm Auflagemaß | 46,5 mm Auflagemaß | M72 x 1,0 |
| Üblichste Befestigung | Kompatibel mit C-Mount-Objektiven | Ideal für 4⁄3 bis APS-C-Sensorformat | Ideal für Anwendungen mit mittelgroßen Zeilen- und Vollformatsensoren (35 mm) | |
| Kürzere Brennweiten sind evtl. nicht kompatibel | Häufig bei kurzen Brennweiten/Varifokal-Objektiven | |||












weitere regionale Telefonnummern
ANGEBOTSTOOL
Geben Sie zum Starten die Produktnummer ein.
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
DATENSCHUTZRICHTLINIE | COOKIE POLICY | AGB | AGB FÜR B2C | IMPRESSUM | BARRIEREFREIHEIT
Die Edmund Optics GmbH Deutschland fungiert als Handelsvermittler für die Edmund Optics BV in den Niederlanden.
Vertragspartner ist Edmund Optics BV in den Niederlanden.
This content may include material that has been generated or modified using artificial intelligence (AI).
The FUTURE Depends On Optics®