












Design telezentrischer Objektive
Autoren: Gregory Hollows, Nicholas James
Dies ist der Abschnitt 4.4 des Leitfadens zur Bildverarbeitung.
In den vorangegangenen Abschnitten wurden die erwähnten Objektive in zwei verschiedene Kategorien unterteilt: telezentrische Objektive und nicht telezentrische Objektive. Es gibt jedoch zwei Arten von Telezentrie: Telezentrie im Objektraum und Telezentrie im Bildraum (die Bezeichnung bezieht sich jeweils auf die Lage der Eintrittspupille und Austrittspupille). Die Pupillen eines optischen Systems sind Bilder der Aperturblende; typischerweise haben Bildverarbeitungsobjektive eingebettete Aperturblenden, die auf beiden Seiten von einzelnen Objektivkomponenten umgeben sind. Die Eintrittspupille ist das Bild der Aperturblende im Objektraum und die Austrittspupille das Bild der Aperturblende im Bildraum. In Abbildung 1 sind die Eintritts- und Austrittspupillen eines nicht telezentrischen Objektivs dargestellt.

Abbildung 1: Ein Bildverarbeitungsobjektiv mit Eintritts- und Austrittspupille im Inneren des Objektivs, wie es für die meisten Objektive mit fester Brennweite typisch ist.
Objektseitige Telezentrie
Wenn ein Bildverarbeitungsobjektiv einfach als telezentrisch beschrieben wird, ist es höchstwahrscheinlich telezentrisch im Objektraum. Ein Objektiv ist telezentrisch im Objektraum, wenn sich die Eintrittspupille im Objektraum im Unendlichen befindet (Zeichnung eines objektseitig telezentrischen Objektivs in Abbildung 2). In einem optischen Design wird die Telezentrie im Objektraum dadurch erreicht, dass die Blende des Systems im Brennpunkt der vorderen Linsengruppe platziert wird. Durch die Eintrittspupille im Unendlichen ist das Bildfeld (FOV) konstant und es gibt keinen Bildwinkel. Da der Hauptstrahl, der das Bildfeld eines Systems definiert, die optische Achse an der Aperturblende kreuzt und durch den Mittelpunkt der Eintrittspupille geht, verläuft der Strahl parallel zur optischen Achse, wenn sich die Pupille im Unendlichen befindet, und der Bildwinkel (AFOV) ist gleich Null (Abbildung 3). Im Gegensatz dazu führt jede Eintrittspupille, die sich in einem endlichen Abstand vom Objektiv entfernt befindet, zu einem nicht parallelen Hauptstrahl, wie in Abbildung 4 für ein nicht telezentrisches Objektiv dargestellt.
Objektive, die nur objektraumtelezentrisch sind, können fokussierbar sein, da die hintere Hälfte des Objektivs mit beweglichen Elementen ausgestattet werden kann, was für Systeme von Vorteil ist, die einen variablen Arbeitsabstand (WD) benötigen. Diese Objektive können auch als Objektive mit variabler Vergrößerung konstruiert werden, da die hinteren Elemente zur Steuerung der Vergrößerung verwendet werden können oder die Sensorebene für kleine Vergrößerungsverschiebungen bewegt werden kann. Telezentrische Objektive, die nur telezentrisch im Objektraum sind, eignen sich besser für größere Bildsensorformate, selbst bei kleineren Objektivgehäusen, da die Strahlen im Bildraum divergieren können; die Rückseite des Objektivs muss daher nicht größer als die Sensorabmessung sein.

Abbildung 2: Ein Objektiv, das im Objektraum telezentrisch ist, die Eintrittspupille ist hier auf der Bildseite im Unendlichen abgebildet.

Abbildung 3: Ein objektseitig telezentrisches Objektiv, bei dem die Hauptstrahlen alle parallel zur optischen Achse im Objektraum verlaufen. Beachten Sie, dass das Bildfeld unabhängig von der Position der Objektebene ist, da die Hauptstrahlen, die das Bildfeld definieren, alle parallel zur optischen Achse verlaufen.

Abbildung 4: Die Eintrittspupille befindet sich dort, wo der objektseitige Hauptstrahl die optische Achse kreuzt, wie hier bei einem nicht telezentrischen Objektiv dargestellt.
Bildseitige Telezentrie
Während die objektseitige Telezentrie durch die Position der Eintrittspupille definiert ist, kann die bildseitige Telezentrie dadurch erreicht werden, dass sich die Austrittspupille im Bildraum im Unendlichen befindet. Eine Darstellung der bildseitigen Telezentrie finden Sie in Abbildung 5. Genauso wie sich die Vergrößerung eines Objekts nicht ändert, wenn das Objektiv objektseitig telezentrisch ist, ändert sich bei einem bildseitig telezentrischen Objektiv die Vergrößerung mit Änderung der Sensorebenenposition nicht (siehe Abbildung 6). Dies bedeutet, dass die Toleranz bei der Sensorpositionierung bei bildseitig telezentrischen Objektiven nicht so bedeutend ist, da kleine Verschiebungen in Richtung oder weg von der optimalen Position keine Unterschiede in der Vergrößerung bei zwei Systemen mit identischen Objektiven verursachen.
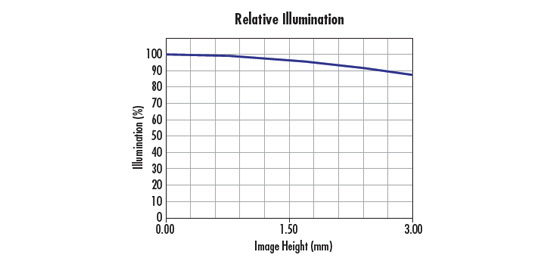
Darüber hinaus leiden bildseitig telezentrische Objektive nicht unter dem radiometrischen cos4θ-Randabfall (siehe Relative Beleuchtung, Randabfall und Vignettierung), da die Strahlen über die gesamte Fläche senkrecht auf den Sensor treffen. Dies hat den Vorteil, dass das Bild ein gleichmäßigeres Beleuchtungsprofil aufweist, vorausgesetzt, dass keine selektive Vignettierung beim Objektivdesign erzeugt wurde.

Abbildung 5: Ein Objektiv, das im Bildraum telezentrisch ist und dessen Austrittspupille hier projiziert auf den Objektraum dargestellt ist.

Abbildung 6: Ein bildseitig telezentrisches Objektiv, bei dem die Hauptstrahlen alle parallel zur optischen Achse im Bildraum verlaufen. Beachten Sie, dass sich die Bildgröße unabhängig von der Position der Sensorebene nicht ändert, da die Hauptstrahlen, die die Bildhöhe definieren, alle parallel zur optischen Achse verlaufen.
Beidseitige Telezentrie
Während die Telezentrie im Objektraum die Messgenauigkeit im Vergleich zu herkömmlichen Objektiven deutlich erhöht, kann eine noch höhere Genauigkeit erreicht werden, wenn ein Objektiv sowohl im Objekt- als auch im Bildraum telezentrisch ist (beidseitig telezentrisch). Bei einem beidseitig telezentrischen Objektiv werden sowohl die Eintritts- als auch die Austrittspupille ins Unendliche projiziert, wie in Abbildung 7 dargestellt. Beidseitig telezentrische Objektive sind der präziseste Typ von telezentrischen Objektiven, da das Bildfeld durch Verschiebungen der Objektposition oder der Sensorposition nicht beeinflusst wird und auch kein cos4θ-Randabfall auftritt.
Abbildung 8 zeigt ein Diagramm, in dem drei verschiedene Objektive verglichen werden - ein Objektiv mit Festbrennweite, ein nur objektseitig telezentrisches Objektiv und ein beidseitig telezentrisches Objektiv -, wobei die x-Achse die Änderung des Arbeitsabstands (in mm) gegenüber dem Nennwert und die y-Achse den Messfehler in Prozent gegenüber dem tatsächlichen Wert darstellt. Wie aus dem Diagramm hervorgeht, ist das beidseitig telezentrische Objektiv mit weniger als 0,2% Fehler bei einer Arbeitsabstandsänderung von 4 mm das genaueste Objektiv der Gruppe. Für Anwendungen, die höchste Genauigkeit und Präzision erfordern, sollten beidseitig telezentrische Objektive verwendet werden.

Abbildung 7: Ein beidseitig telezentrisches Objektiv, bei dem sich Eintritts- und Austrittspupille im Unendlichen des Bild- bzw. Objektraums befinden.













weitere regionale Telefonnummern
ANGEBOTSTOOL
Geben Sie zum Starten die Produktnummer ein.
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
DATENSCHUTZRICHTLINIE | COOKIE POLICY | AGB | AGB FÜR B2C | IMPRESSUM | BARRIEREFREIHEIT
Die Edmund Optics GmbH Deutschland fungiert als Handelsvermittler für die Edmund Optics BV in den Niederlanden.
Vertragspartner ist Edmund Optics BV in den Niederlanden.
This content may include material that has been generated or modified using artificial intelligence (AI).
The FUTURE Depends On Optics®