












Tests und Testbilder
Überblick über Testbilder
Dies ist der Abschnitt 12.2 des Leitfadens zur Bildverarbeitung.
Mit der Hilfe von Testbildern lässt sich die Leistung eines Bildgebungssystems ermitteln. Dazu gehören die Fehlersuche in einem System, das Benchmarking, die Zertifizierung oder die Bewertung von Messungen sowie die Schaffung einer Grundlage, die sicherstellt, dass mehrere Systeme gut zusammenarbeiten. Da die Bildqualität durch verschiedene Werte wie z. B. Auflösung, Kontrast, Modulationstransferfunktion (MTF), Tiefenschärfe (DOF) oder Verzerrung definiert werden kann, können verschiedene Systeme unterschiedliche Testbilder erfordern. Für einige Systeme sind möglicherweise mehrere erforderlich. Beachten Sie, dass die Ergebnisse beim Einsatz eines Testbilds subjektiv sind, wenn die Bilder nur visuell betrachtet werden; die visuelle Auswertung hängt vom Betrachter ab. Jemand mit einer guten Sehschärfe ist in der Regel in der Lage eine höhere Auflösung oder mehr Details zu erkennen als jemand mit einer geringeren Sehschärfe. Darüber hinaus haben Personen, die sich Testbilder regelmäßig ansehen, ihr Gehirn möglicherweise darauf trainiert Details zu interpolieren, die in Wirklichkeit nicht vorhanden sind, weil sie die sich wiederholenden Muster des Testbildes sehen. Eine visuelle Inspektion kann helfen, zwei verschiedene Systeme zu vergleichen, aber die Ergebnisse können nicht als belastbare Messwerte verwendet werden. Es ist wichtig, Software zu benutzen, um Messungen wirklich zu validieren.
| Testbilder für Auflösungsmessungen | |||
| Testbild | Anwendungen | Vorteile | Nachteile |
| USAF 1951 | Auflösungstests für Bildverarbeitungssysteme, optische Prüfgeräte, Mikroskope, Videoobjektive mit hoher Vergrößerung, Fluoreszenz- und Konfokalmikroskopie, Photolithographie und Nanotechnologie | Gleichzeitige Prüfung der vertikalen und horizontalen Auflösungen bei bestimmten Raumfrequenzen | Testbild muss neu positioniert werden, um die Leistung eines Systems vollständig zu bewerten |
| Schwierig zu bestimmen, wann das gesamte Bildfeld im besten Fokus ist | |||
| Strichgitter | Prüfung von Auflösung und Kontrast | Bestimmung des besten Fokus des Systems über gesamtes Bildfeld zur gleichen Zeit | Für jede zu bewertende Frequenz ist ein anderes Testbild erforderlich |
| Beugungstests | Nicht-symmetrische Auflösungsreduzierungen können nicht analysiert werden | ||
| Siemensstern | Vergleich von hochauflösenden oder hoch vergrößernden Abbildungssystemen | Potenziell am besten für die Prüfung von Auflösung und Kontrast geeignet | Es ist schwierig, die genaue Auflösung zu bestimmen, die das Prüfsystem bei jedem Element erreicht |
| Systemausrichtung | Es kann eine kontinuierliche Änderung der Auflösung über mehrere Ausrichtungen hinweg bewertet werden, ohne Neupositionierung des Testbilds | ||
| Hilfe bei der Montage | Erleichtert den Vergleich verschiedener Bildgebungssysteme | Erfordert fortschrittliche Bildanalysesoftware | |
Tabelle 1: Anwendungen und die Vor- und Nachteile der verschiedenen Testbilder
Das USAF-1951-Testbild
Dies ist der Abschnitt 12.3 des Leitfadens zur Bildverarbeitung.
Das USAF-1951-Testbild ist eines der am häufigsten verwendeten Testbilder und besteht aus horizontalen und vertikalen Liniensätzen, die als Elemente bezeichnet werden und unterschiedlich groß sind (Abbildung 1).
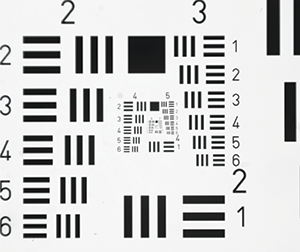
Abbildung 1: Beispiel eines USAF-1951-Testbilds
Die horizontalen und vertikalen Elemente dienen zur gleichzeitigen horizontalen und vertikalen Auflösungsprüfung bei bestimmten Raumfrequenzen (Linienpaare pro Millimeter oder $ \small{ \tfrac{\text{lp}}{\text{mm}} } )$ in der Objektebene. Jedes Element hat eigene Breiten und Abstände und ist mit einer Nummer von 1 bis 6 gekennzeichnet. Sechs fortlaufend nummerierte Elemente werden als Gruppe betrachtet und jede Gruppe hat eine Kennzahl, die positiv, negativ oder Null sein kann. Diese Gruppennummer reicht von -2 bis 7. Die Gruppennummer und die Elementnummer werden dann zusammen zur Bestimmung der Raumfrequenz verwendet. Die Auflösung basiert auf einem Linienpaar (lp), das einem schwarzen und einem weißen Balken entspricht (Abbildung 2).
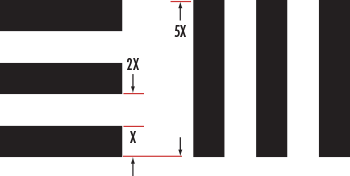
Abbildung 2: Testbild-Spezifikationen für USAF 1951
Vertikale Balken werden für die Berechnung der horizontalen Auflösung verwendet, horizontale Balken für die Berechnung der vertikalen Auflösung.
Qualitativ gesehen ist die Auflösung eines bildgebenden Systems definiert als die Kombination aus Gruppe und Element, die sich unmittelbar vor dem Verschwimmen der schwarzen und weißen Balken befindet. Quantitativ kann die Auflösung (in $ \small{ \tfrac{\text{lp}}{\text{mm}} } )$ mit Gleichung 1 berechnet werden, wobei $\small{\xi} $ die Auflösung in $ \small{ \tfrac{\text{lp}}{\text{mm}} }$, $\small{G}$ die Gruppennummer und $ \small{E} $ die Elementnummer ist.
Die USAF-1951-Testbilder sind so konzipiert, dass Elemente mit höherer Auflösung näher an der Mitte des Testbilds liegen, während Elemente mit niedrigerer Auflösung näher an den Rändern des Testbilds liegen. Diese Anordnung ist für die Prüfung von Zoomobjektiven von Vorteil. Das Testbild muss beim Zoomen nicht neu positioniert werden, da die Elemente mit höherer Auflösung im Sichtfeld verbleiben, wenn die Vergrößerung des Objektivs das Sichtfeld verkleinert.
Einschränkungen bei USAF-1951-Testbildern
Die mittige Positionierung der Elemente mit höherer Auflösung bei USAF-1951-Testbildern hat aber auch Nachteile. Objektive erzeugen unterschiedliche Auflösungen in der Mitte und in den Ecken des Bildfeldes. Wenn man sich von der Mitte des Bildfeldes entfernt, nimmt die Auflösung in der Regel ab, sodass es wichtig ist, die Auflösung und den Kontrast an mehreren Bildpositionen zu überprüfen. Um die gesamte Leistung eines Systems zu bewerten, muss das Testbild im Bildfeld neu positioniert werden und es müssen mehrere Bilder aufgenommen werden, was zu einer längeren Testzeit führt. Das System kann auf die Mitte des Bildfeldes oder ausgeglichen auf das gesamte Bildfeld fokussiert sein; da die Auflösung über das Bildfeld hinweg variiert, kann es schwierig sein, zu bestimmen, wann das gesamte Bildfeld im besten Fokus liegt. Einige Objektive erreichen eine sehr hohe Auflösung in der Mitte des Bildfeldes, aber eine sehr niedrige Auflösung in den Ecken, wenn das Objektiv und das Kamerasystem auf die Mitte des Bildes fokussiert sind. Defokussieren Sie das Objektiv leicht, um die Auflösung über das gesamte Bildfeld auszugleichen. Dies geht zu Lasten der Auflösung in der Mitte. Die Abnahme der Auflösung in der Mitte ist jedoch nicht unbedingt ein Nachteil, denn das Objektiv kann in vielen Fällen immer noch die Anforderungen der Anwendung erfüllen und trotzdem einen ausgewogenen Fokus erreichen (Abbildung 3).
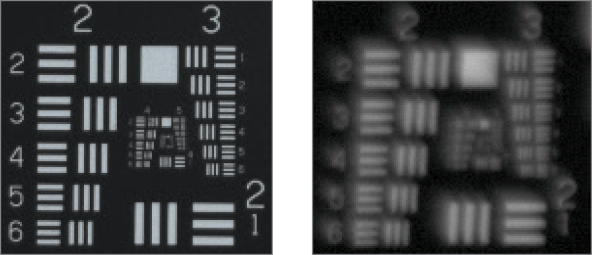
Abbildung 3a: Beispiel eines USAF-1951-Testbilds: Die Mitte und die Ecke eines Bildes bei dem der beste Fokus nur in der Mitte des Testbilds liegt.
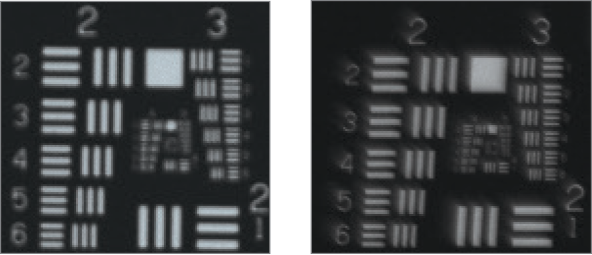
Abbildung 3b: Die Mitte und die Ecke eines Bildes, das über das gesamte Feld eine ausgewogene Schärfe aufweist.
Die potenzielle Auflösungsvariabilität über das gesamte Bildfeld hinweg unterstreicht die Notwendigkeit alle Bildpositionen zu analysieren, bevor Rückschlüsse auf die Leistung eines Systems gezogen werden. Das Objektiv, das mit dem Testbild in der Mitte die beste Leistung erbringt, muss nicht unbedingt die beste Gesamtleistung erbringen. Es ist jedoch von entscheidender Bedeutung, dass die gesamte Analyse mit einer einzigen Fokuseinstellung durchgeführt wird. Es mag intuitiv erscheinen, die beste Leistung des Systems in der Mitte des Bildfeldes zu bestimmen und dann neu zu fokussieren, um die Leistung in den Ecken zu bestimmen, aber dies zeigt nicht wie das System im realen Einsatz funktioniert, da eine Neufokussierung während des Betriebs oft nicht möglich ist.
Es sind Versionen des USAF-Testbilds verfügbar, die eine Analyse über das gesamte Bildfeld ermöglichen, indem die Prüfmuster an zahlreichen Stellen des Testbilds wiederholt werden (Abbildung 4).
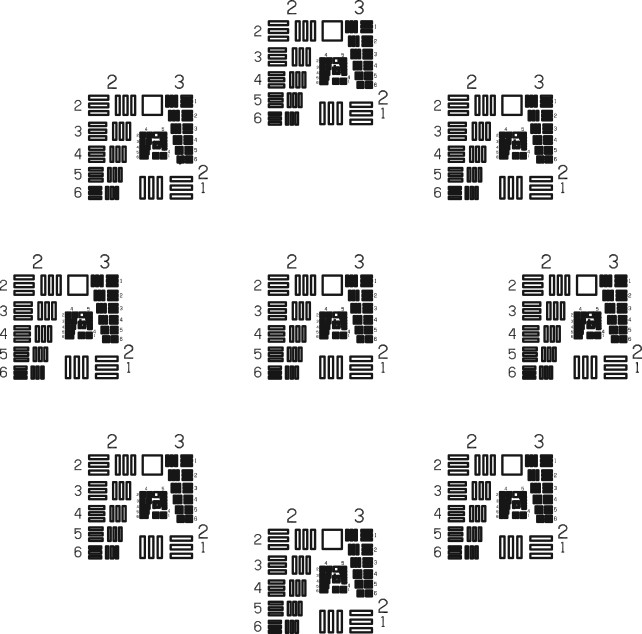
Abbildung 4a: Kreisförmig angeordnete USAF-1951-Testmuster
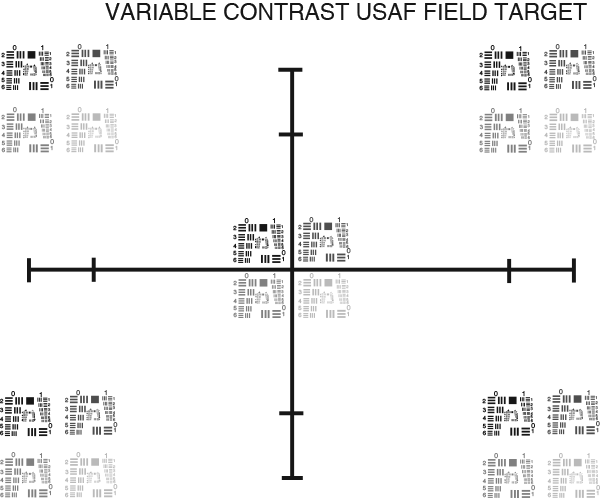
Abbildung 4b: Ein USAF-1951-Testmuster mit verschiedenen Bildpositionen und Kontrastwerten
Strichgitter
Dies ist der Abschnitt 12.4 des Leitfadens zur Bildverarbeitung.
Einige Probleme, die mit den USAF-1951-Testbildern verbunden sind, werden durch die Verwendung eines Strichgitters gelöst. Strichgitter haben sich wiederholende Linien mit einer einzigen Raumfrequenz über die gesamte Fläche des Testbilds (Abbildung 5). Da sich das Testmuster über das gesamte Testbild erstreckt, kann der beste Fokus des Systems über das gesamte Bildfeld bewertet werden. Für Anwendungen, bei denen nur eine Frequenz analysiert werden muss, ist ein Strichgitter ein einfach einsetzbares, unkompliziertes Werkzeug. Die Anwendung eines Strichgitters hat jedoch zwei Nachteile. Erstens ist für jede Frequenz ein neues Testbild erforderlich, da ein Testbild immer nur eine Frequenz bietet. Zweitens können unsymmetrische Auflösungsverringerungen im gesamten Feld, die auf Faktoren wie Astigmatismus zurückzuführen sind, nicht analysiert werden, da die Linien nur in eine Richtung orientiert sind. Eine Drehung um 90° und die Aufnahme eines zweiten Bildes zur Analyse der Auflösung behebt dieses Problem. Der beste Fokus eines Objektivs kann eingestellt werden (auch im Falle von Astigmatismus), allerdings kann es durch den Wechsel schwierig sein diesen besten Fokus zu bestimmen.
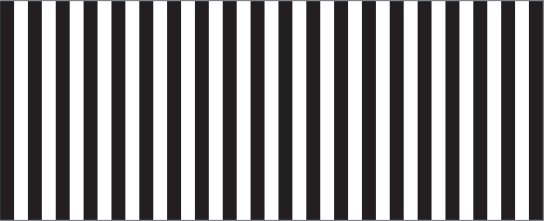
Abbildung 5: Ein Strichgitter
Der Siemensstern
Dies ist der Abschnitt 12.5 des Leitfadens zur Bildverarbeitung.
Eine Siemenssternmatrix mit mehreren Elementen ist möglicherweise das leistungsfähigste Instrument zur Prüfung der Auflösung und des Kontrasts eines Systems und vereint viele der Stärken der USAF-Testbilder und Strichgitter. Jedes Element der Siemenssternmatrix besteht aus einem Kreis, der aus abwechselnd positiven und negativen tortenförmigen Keilen besteht, die sich in einem bekannten Winkel zur Mitte hin verjüngen (Abbildung 6). Die sich verjüngenden Keile des Elements ermöglichen eine kontinuierliche Änderung der Auflösung, die sowohl in vertikaler als auch in horizontaler Richtung sowie in einer Vielzahl anderer Ausrichtungen ausgewertet werden kann, ohne dass das Testbild neu positioniert werden muss.
Die große Anzahl an Sternen im gesamten Bildfeld erleichtert den Vergleich verschiedener Abbildungslösungen, da der beste Fokus im gesamten Sichtfeld bestimmt werden kann, während gleichzeitig horizontale und vertikale Informationen bei verschiedenen Auflösungen analysiert werden können. Abbildung 4 zeigt das komplette Siemenssterntestbild; die hervorgehobenen Bereiche in der Mitte, in der Mitte unten und in der Ecke des Testbilds werden in den zusätzlichen Beispielbildern für zwei verschiedene Objektive verglichen. Für die Beispielbilder wurde ein Sony ICX625 Monochromsensor mit 3,45 µm Pixelgröße und einer Gesamtauflösung von 5 MP sowie eine Weißlicht-Hintergrundbeleuchtung verwendet.
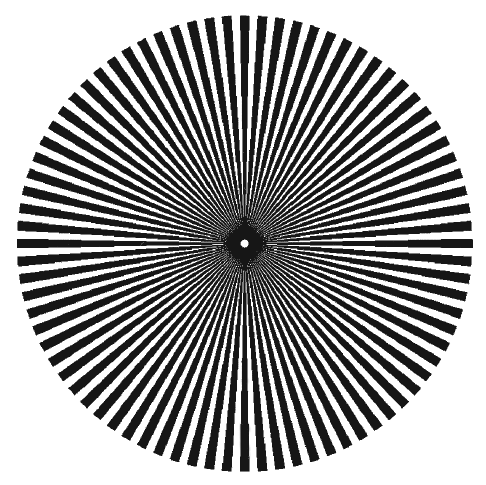
Abbildung 6: Ein Siemensstern
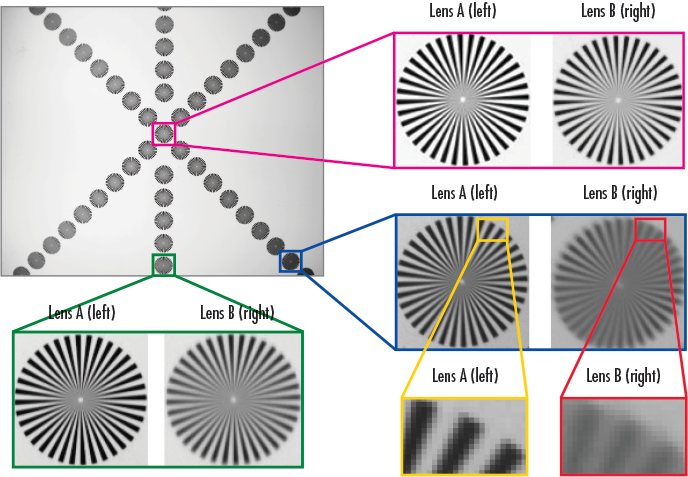
Abbildung 7: Das Siemenssterntestbild wird mit zwei Objektiven (A und B) mit gleicher Brennweite, Blende, gleichem Bildfeld und Sensor abgebildet. Die bessere Abbildungsqualität von Objektiv A wird am Rand und in den Ecken des Sensors besonders deutlich.
Einschränkungen bei Siemenssternen
Bei einem Siemensstern gibt es auch Nachteile. Da die Keile eine kontinuierliche Veränderung der Auflösung bewirken, ist es schwieriger, die genaue Auflösung zu bestimmen, die das System bei jedem Siemenssternelement der Matrix erreicht. Dies ist zwar mathematisch möglich, aber visuell nicht ganz einfach. Darüber hinaus erschwert die Kombination der kreisförmigen Sternelemente mit der Möglichkeit unsymmetrischer Unschärfe die Verwendung einfacher Softwaretools, wie z. B. Line-Profiler, um Informationen aus dem Bild zu extrahieren. Um das Siemenssterntestbild vollständig nutzen zu können, ist eine fortschrittlichere Bildanalysesoftware erforderlich.
Telezentrietester
Dies ist der Abschnitt 12.6 des Leitfadens zur Bildverarbeitung.
Mit Hilfe von Telezentrietestern lassen sich Trapezverzerrungen in einem Bild sichtbar machen und genau messen. Das Ausmaß der Trapezverzerrung hängt mit der Telezentrie des Objektivs zusammen, das für die Abbildung des Testbildes verwendet wird. Der Telezentrietester hat einen Winkel von 45° zur optischen Achse, sodass der untere Bereich des Testbildes weiter vom Objektiv entfernt ist als der obere Bereich (Abbildung 8).

Abbildung 8: Ein Telezentrietester unter einem Objektiv
Wenn das Testbild durch ein nicht telezentrisches Objektiv abgebildet wird, scheint sich der Abstand zwischen den vertikalen Linien am unteren Rand des Bildes zu verringern (Abbildung 9); dieser Effekt wird als Trapezverzerrung bezeichnet. Ein perfekt telezentrisches Objektiv weist keine Trapezverzerrung auf und die Telezentrie beträgt 0° (Abbildung 10).

Abbildung 9: Dieses Bild (aufgenommen mit einem Objektiv mit 8 mm Brennweite) zeigt die Trapezverzerrung. Die Linien laufen im unteren Bildbereich ganz eindeutig zusammen. Der Mittelpunkt der Linie hat im unteren Bildbereich nicht die gleiche Position wie im oberen Bildbereich.

Abbildung 10: Es ist eindeutig, dass die Unschärfe in diesem Bild (aufgenommen mit einem telezentrischen Objektiv) symmetrisch ist. Wenn ein horizontales Linienprofil über das gesamte Bild genommen wird und der Mittelpunkt jeder schwarzen Linie bestimmt wird, ist die Position dieses Mittelpunkts im unscharfen und im scharfen Bildbereich gleich.
Der Positionsunterschied aus dem Testbild kann über die folgenden Schritte in einen Telezentriegrad umgewandelt werden:
- Ermitteln Sie den Abstand zwischen oberem und unterem Linienprofil. $ \Delta Y = \left( Y_1 - Y_2 \right) $
- Ermitteln Sie den horizontalen Versatz. $ \Delta X = \left| X_1 - X_2 \right| $
- Berechnen Sie den telezentrischen Winkel. $ \theta = \tan ^{-1} \left( \tfrac{\Delta X}{\Delta Y} \right) $
Tiefenschärfetester
Dies ist der Abschnitt 12.7 des Leitfadens zur Bildverarbeitung.
Tiefenschärfetester ermöglichen die Visualisierung und Quantifizierung der Fokusänderung, wenn man sich von der Fokusebene eines Objektivs entfernt. Tiefenschärfetester bestehen aus Linien mit bekannter Auflösung, die in einem bestimmten Winkel verkippt werden. So kann ermittelt werden, wie gut der Fokus erhalten bleibt. Wenn die Linien weiter vom Objektiv entfernt sind oder näher am Objektiv liegen, werden sie unschärfer, bis sie nicht mehr voneinander unterschieden werden können. Bei verschiedenen Entfernungen kann eine Kontrastmessung durchgeführt werden, um zu bestimmen, wann die benötigte Auflösung nicht mehr erreicht wird. Daraus können die Tiefenschärfegrenzen für das Objektiv in einem bestimmten Aufbau ermittelt werden. Abbildung 11 und 12 zeigen wie ein Tiefenschärfetester verwendet wird.
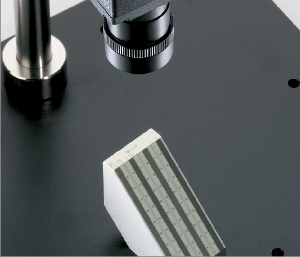
Abbildung 11: Ein Tiefenschärfetester sollte unter 45° zum Objektiv eingesetzt werden.
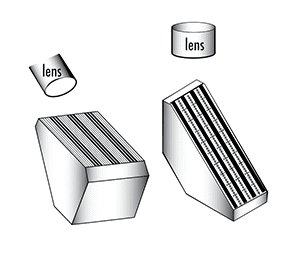
Abbildung 12: Beispielaufbauten mit einem Tiefenschärfetester
Beispiel: Nutzung eines Tiefenschärfetesters
50-mm-Objektiv der DG-Serie
Abbildung 13 zeigt Bilder einer vertikal montierten Kamera, die über einem Tiefenschärfetester angebracht ist, der um 45° verkippt ist. Das Objektiv ist auf die Mitte des Testbildes fokussiert und das Bild wird zum oberen und unteren Rand des Testbildes hin unschärfer. Die Bilder zeigen drei verschiedene Blendeneinstellungen und wie eine Verstellung der Blende die Tiefenschärfe beeinflussen kann. Bitte beachten Sie: Auch Strichgitter können für diese Art von Test eingesetzt werden, da sie eine feste Frequenz haben und für diesen Test verkippt werden können. Je größer der Kippwinkel, desto größer ist der Tiefenschärfebereich, der vermessen werden kann.
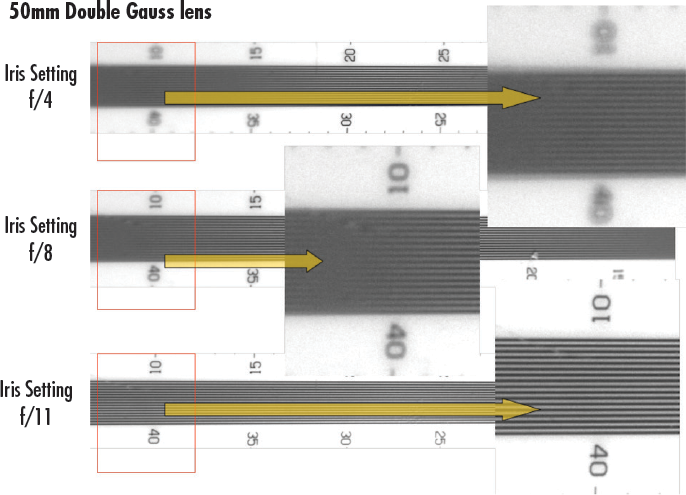
Abbildung 13: Bilder eines Tiefenschärfetesters aufgenommen mit einem 50-mm-Objektiv bei Blende 4, 8 und 11.
Auf www.edmundoptics.de/imaging-lab finden Sie das Informationsvideo EO Imaging Lab Module 1.8 über das Thema Tiefenschärfe.
Verzeichnungstestbilder
Dies ist der Abschnitt 12.8 des Leitfadens zur Bildverarbeitung.
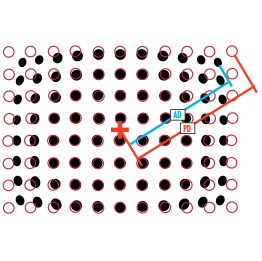
Verzeichnungstestbilder werden zur Systemkalibrierung verwendet und um die optische Verschiebung bei der Bildentstehung zu messen. Die Testbilder bestehen aus Punkten, Gittern oder quadratischen Mustern, sind kompatibel mit der meisten Bildverarbeitungssoftware und es können Messungen über das gesamte Bildfeld durchgeführt werden (Abbildung 14).

Abbildung 14: Ein Verzeichnungstestbild mit Punktgitter
Abbildung 15 zeigt die Arten von Verzeichnung, die ausgeglichen werden können. Wird ein Bild von einem Testbild gemacht, so ermöglichen die bekannte Größe und die bekannten Abstände des Musters einen Ausgleich der Verzeichnung (Abbildung 15).
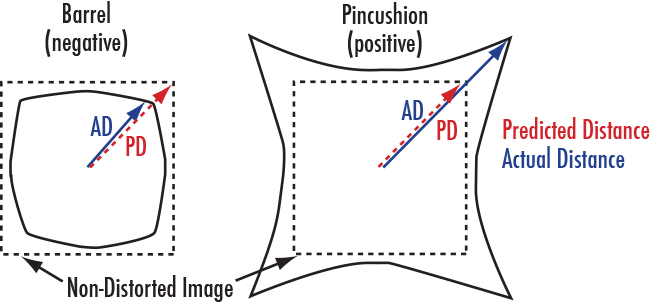
Abbildung 15: Verschiedene Arten von Verzeichnung













weitere regionale Telefonnummern
ANGEBOTSTOOL
Geben Sie zum Starten die Produktnummer ein.
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
DATENSCHUTZRICHTLINIE | COOKIE POLICY | AGB | AGB FÜR B2C | IMPRESSUM | BARRIEREFREIHEIT
Die Edmund Optics GmbH Deutschland fungiert als Handelsvermittler für die Edmund Optics BV in den Niederlanden.
Vertragspartner ist Edmund Optics BV in den Niederlanden.
This content may include material that has been generated or modified using artificial intelligence (AI).
The FUTURE Depends On Optics®