Unsere Ingenieure helfen Ihnen gerne.


|
|
Erfassung von Bildern von Objekten außerhalb des Sichtfeldes, hinter einer Ecke oder eines Hindernisses |
|
|
Mit Hilfe des reflektierten Lichts von einem verdeckten Objekt wird ein 3D-Modell dieses Objekts rekonstruiert |
|
|
Das Laserlicht wird von umliegenden Gegenständen auf ein verdecktes Objekt gestreut |
|
|
Viele potenzielle Vorteile für autonome Fahrzeuge, das Gesundheitswesen und die medizinische Bildgebung |
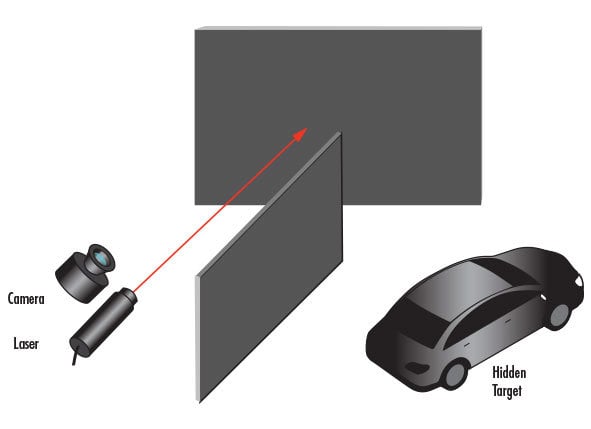
Eine direkte Sichtverbindung zwischen einem Objekt und einer Kamera oder einem Detektor ist typischerweise für jede Bildgebungsanwendung erforderlich. Extremfälle, wie die Lichtbiegung aufgrund des Gravitationslinseneffekts in der Astronomie, ist eine Ausnahme. In der Regel beschränken sich die Bildgebungsanwendungen jedoch auf Licht, das sich geradlinig ausbreitet. Aktuellste Ergebnisse aus der Forschung zeigen, dass es möglich ist, Bilder von verborgenen Objekten, hinter einer Kurve oder eines Hindernisses, aufnehmen zu können. Bei dieser Methode wird eine Kombination aus Lasern, hochempfindlichen Kameras und rechnergestützten Rekonstruktionsverfahren verwendet, um verborgene Objekte zu erkennen, indem Licht von umliegenden Gegenständen reflektiert wird.
Das Verfahren für die Non-line-of-sight-Bildgebung ähnelt dem von LiDAR (Light Detection and Ranging). Bei diesem wird ein Laserimpuls auf ein Objekt gerichtet und die direkte Reflexion wird verwendet, um den Abstand zwischen dem Objekt und einem Detektor zu messen. Allerdings wird bei der Non-line-of-sight-Bildgebung ein weiteres Streuereignis genutzt, um Objekte, die durch Hindernisse verdeckt sind, zu erkennen.1
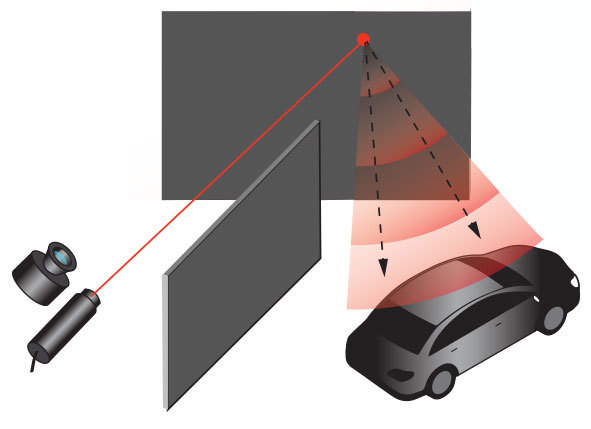
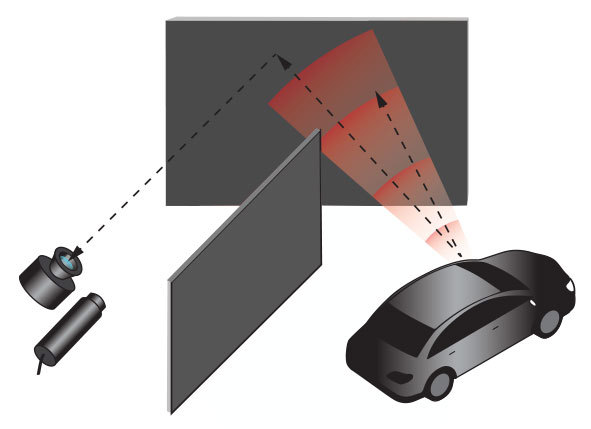
Um die Ausbreitung von Piko- und Femtosekunden-Laserimpulsen in Echtzeit zu messen, sind hochempfindliche Kameras erforderlich, wie beispielsweise Einzelphotonen-Avalanche-Photodioden-Kameras. Der Detektor empfängt zwei verschiedene Reflexionssignale: ein erstes Signal von dem Licht, das direkt von der Wand reflektiert wird und ein sekundäres Signal von jenem Licht, das von dem Objekt reflektiert wird. Letzteres ist das Signal, das für die Non-line-of-sight-Bildgebung verwendet wird. Diese time-of-flight Information wird dann verwendet, um eine Reihe von Ellipsoiden zu rekonstruieren, die sich alle an einem bestimmten Punkt auf dem verborgenen Objekt überlappen, so dass die Computersoftware den Abstand zwischen der Kamera und dem verborgenen Objekt berechnen und ein 3D-Modell des Objekts erstellen kann.
Ein 3D-Objekt ist eine Ansammlung von vielen einzelnen Punkten, die Licht streuen. Durch die Addition all dieser Punkte kann ein Modell des ursprünglichen Objekts rekonstruiert werden. Wenn der Detektor Reflexionsimpulse mit einer zeitlichen Auflösung von 100 ps unterscheiden kann, entspricht dies einer räumlichen Auflösung von Punkten auf dem verborgenen Objekt von ca. 1,5 cm. 1
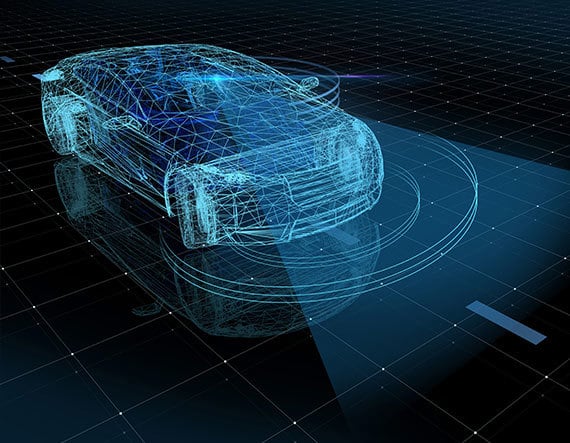
Ermöglicht es Autos, herannahende Fahrzeuge oder Fußgänger um Kurven zu erfassen, bevor sie sich in der direkten Sichtlinie des Autos befinden.2

Ermöglicht es den Strafverfolgungsbehörden, Feuerwehrleuten und Notärzten, die Anwesenheit von Personen in gefährlichen Situationen aus sicherer Entfernung zu erkennen2
Untersuchung kleiner 3D-Strukturen, die sich außerhalb der direkten Sichtlinie des Systems befinden2
Mit dieser neuartigen Technologie eine praktische Lösung für den realen Einsatz zu entwickeln, die portabel und für die Augen des Betrachters ungefährlich ist, ist eine große Herausforderung. Eines der Hauptprobleme bei der Non-line-of-sight-Bildgebung ist die begrenzte Lichtmenge, die zum Detektor zurückkehrt. Dieser muss in der Lage sein, diese sehr geringe Lichtmenge zu detektieren und von allen Umgebungslichtquellen zu unterscheiden. Das Rücksignal zum Detektor ist das Ergebnis zweier aufeinanderfolgender Streuereignisse, die zu einem extrem hohen Verlust führen. Die Rücksignale können so niedrig wie ein Photon pro Laserpuls sein.1
Das Stanford Computational Imaging Lab hat jedoch ein Non-line-of-sight-Bildgebungs-System entwickelt, das im Freien unter indirekter Sonneneinstrahlung funktioniert.2 Sie haben erfolgreich ein Objekt aus reflektierendem Tape abgebildet, das von einer Wand verdeckt wurde, was für die erfolgversprechende Zukunft dieser Technologie spricht.
Das Labor von Aristide Dogariu von der University of Central Florida untersucht die Non-line-of-sight-Bildgebung unter Verwendung der räumlichen Kohärenz von Licht, das auf eine Wand trifft, anstelle von Laserlicht, das von dieser Wand und dem dahinter liegenden Objekt reflektiert wird.3 Dies könnte zu einem 3D-Modell des Objekts führen, ohne dass Ultrakurzpulslaser erforderlich sind, wodurch reale Anwendungen der Technologie mobiler und benutzerfreundlicher wären.
Es ist noch weiterer Entwicklungsbedarf notwendig, bevor die Non-line-of-sight-Bildgebungs-Technologie in praktischen kommerziellen Systemen verfügbar sein wird. Sie ist jedoch eine vielversprechende Technologie für die nächste Generation von Bildgebungsanwendungen.
Referenzen1. Faccio, Daniele. “Non-Line-of-Sight Imaging.” Optics and Photonics News, vol. 30, no. 1, Jan. 2019, pp. 36–43.
2. M. O’Toole, D.B. Lindell, G. Wetzstein, “Confocal Non-Line-of-Sight Imaging Based on the Light-Cone Transform”, Nature, 2018.
3. Batarseh, M., et al. “Passive Sensing around the Corner Using Spatial Coherence.” Nature Communications, vol. 9, no. 1, 2018, doi:10.1038/s41467-018-05985-w.
Edmund Optics® (EO) entwickelt und produziert Objektive und Ultrakurzpulslaser-Optiken, die beide in Non-line-of-sight-Bildgebungs-Systemen eingesetzt werden.
 Verkauft EO komplette Geräte für die Non-line-of-sight-Bildgebung?
Überlagert das Laserlicht, das zunächst von der Wand gestreut wird, nicht die sekundäre Lichtstreuung vom verborgenen Objekt?
Verkauft EO komplette Geräte für die Non-line-of-sight-Bildgebung?
Überlagert das Laserlicht, das zunächst von der Wand gestreut wird, nicht die sekundäre Lichtstreuung vom verborgenen Objekt?
Die Lichtstreuung direkt von der Wand ist viel stärker als die sekundäre Lichtstreuung vom indirekten Objekt, aber es gibt eine Zeitverzögerung zwischen diesen, die es hochempfindlichen Detektoren mit einer ausreichend hohen zeitlichen Auflösung ermöglicht, die beiden Signale zu unterscheiden.2
Sobald die Zeitverzögerung für die sekundäre Streuung des verborgenen Objekts erfasst ist, wie erstellt die computergestützte Rekonstruktionssoftware ein 3D-Modell des Objekts?
Die Software speichert zunächst alle Messungen in einem 3D-Raumzeitvolumen. Anschließend werden die Messungen entlang der Zeitachse neu abgetastet, das Ergebnis mit einem inversen Filter im Frequenzbereich zusammengefügt und das Ergebnis entlang der Tiefenachse neu abgetastet, um das verborgene Objekt zu rekonstruieren.2
HWie lange dauert es, bis ein 3D-Modell des verborgenen Objekts nach der Datenerfassung rekonstruiert ist?
Das Non-line-of-sight-Bildgebungs-System des Stanford Computational Imaging Lab dauert nur 0,5 Sekunden, um ein 3D-Modell zu erstellen.2


















weitere regionale Telefonnummern
ANGEBOTSTOOL
Geben Sie zum Starten die Produktnummer ein.
Copyright 2023 | Edmund Optics, Ltd Unit 1, Opus Avenue, Nether Poppleton, York, YO26 6BL, UK
DATENSCHUTZRICHTLINIE | COOKIE POLICY | AGB | AGB FÜR B2C | IMPRESSUM | BARRIEREFREIHEIT
Die Edmund Optics GmbH Deutschland fungiert als Handelsvermittler für die Edmund Optics BV in den Niederlanden.
Vertragspartner ist Edmund Optics BV in den Niederlanden.
This content may include material that has been generated or modified using artificial intelligence (AI).
The FUTURE Depends On Optics®